2021-02-27 22:09:58 +01:00
|
|
|
---
|
2023-04-04 00:12:06 +02:00
|
|
|
layout: forward
|
|
|
|
|
target: https://developers.google.com/mediapipe/solutions/vision/pose_landmarker/
|
2021-02-27 22:09:58 +01:00
|
|
|
title: Pose Classification
|
|
|
|
|
parent: Pose
|
2023-04-04 02:41:28 +02:00
|
|
|
grand_parent: MediaPipe Legacy Solutions
|
2021-02-27 22:09:58 +01:00
|
|
|
nav_order: 1
|
|
|
|
|
---
|
|
|
|
|
|
|
|
|
|
# Pose Classification
|
|
|
|
|
{: .no_toc }
|
|
|
|
|
|
|
|
|
|
<details close markdown="block">
|
|
|
|
|
<summary>
|
|
|
|
|
Table of contents
|
|
|
|
|
</summary>
|
|
|
|
|
{: .text-delta }
|
|
|
|
|
1. TOC
|
|
|
|
|
{:toc}
|
|
|
|
|
</details>
|
|
|
|
|
---
|
|
|
|
|
|
2023-03-01 18:19:12 +01:00
|
|
|
**Attention:** *Thank you for your interest in MediaPipe Solutions.
|
2023-06-02 00:29:06 +02:00
|
|
|
As of May 10, 2023, this solution was upgraded to a new MediaPipe
|
2023-04-04 00:12:06 +02:00
|
|
|
Solution. For more information, see the
|
|
|
|
|
[MediaPipe Solutions](https://developers.google.com/mediapipe/solutions/vision/pose_landmarker/)
|
2023-03-01 18:19:12 +01:00
|
|
|
site.*
|
|
|
|
|
|
|
|
|
|
----
|
|
|
|
|
|
2021-02-27 22:09:58 +01:00
|
|
|
## Overview
|
|
|
|
|
|
|
|
|
|
One of the applications
|
|
|
|
|
[BlazePose](https://ai.googleblog.com/2020/08/on-device-real-time-body-pose-tracking.html)
|
|
|
|
|
can enable is fitness. More specifically - pose classification and repetition
|
|
|
|
|
counting. In this section we'll provide basic guidance on building a custom pose
|
2021-03-25 23:01:44 +01:00
|
|
|
classifier with the help of [Colabs](#colabs) and wrap it in a simple fitness
|
|
|
|
|
demo within
|
|
|
|
|
[ML Kit quickstart app](https://developers.google.com/ml-kit/vision/pose-detection/classifying-poses#4_integrate_with_the_ml_kit_quickstart_app).
|
|
|
|
|
Push-ups and squats are used for demonstration purposes as the most common
|
|
|
|
|
exercises.
|
2021-02-27 22:09:58 +01:00
|
|
|
|
2022-09-06 23:29:51 +02:00
|
|
|
 |
|
2021-02-27 22:09:58 +01:00
|
|
|
:--------------------------------------------------------------------------------------------------------: |
|
|
|
|
|
*Fig 1. Pose classification and repetition counting with MediaPipe Pose.* |
|
|
|
|
|
|
|
|
|
|
We picked the
|
|
|
|
|
[k-nearest neighbors algorithm](https://en.wikipedia.org/wiki/K-nearest_neighbors_algorithm)
|
|
|
|
|
(k-NN) as the classifier. It's simple and easy to start with. The algorithm
|
|
|
|
|
determines the object's class based on the closest samples in the training set.
|
|
|
|
|
|
|
|
|
|
**To build it, one needs to:**
|
|
|
|
|
|
|
|
|
|
1. Collect image samples of the target exercises and run pose prediction on
|
|
|
|
|
them,
|
|
|
|
|
2. Convert obtained pose landmarks to a representation suitable for the k-NN
|
|
|
|
|
classifier and form a training set using these [Colabs](#colabs),
|
|
|
|
|
3. Perform the classification itself followed by repetition counting (e.g., in
|
|
|
|
|
the
|
2021-03-25 23:01:44 +01:00
|
|
|
[ML Kit quickstart app](https://developers.google.com/ml-kit/vision/pose-detection/classifying-poses#4_integrate_with_the_ml_kit_quickstart_app)).
|
2021-02-27 22:09:58 +01:00
|
|
|
|
|
|
|
|
## Training Set
|
|
|
|
|
|
|
|
|
|
To build a good classifier appropriate samples should be collected for the
|
|
|
|
|
training set: about a few hundred samples for each terminal state of each
|
|
|
|
|
exercise (e.g., "up" and "down" positions for push-ups). It's important that
|
|
|
|
|
collected samples cover different camera angles, environment conditions, body
|
|
|
|
|
shapes, and exercise variations.
|
|
|
|
|
|
2022-09-06 23:29:51 +02:00
|
|
|
 |
|
2021-02-27 22:09:58 +01:00
|
|
|
:--------------------------------------------------------------------------------------------------------------------------: |
|
|
|
|
|
*Fig 2. Two terminal states of push-ups.* |
|
|
|
|
|
|
|
|
|
|
To transform samples into a k-NN classifier training set, both
|
|
|
|
|
[`Pose Classification Colab (Basic)`] and
|
|
|
|
|
[`Pose Classification Colab (Extended)`] could be used. They use the
|
|
|
|
|
[Python Solution API](./pose.md#python-solution-api) to run the BlazePose models
|
|
|
|
|
on given images and dump predicted pose landmarks to a CSV file. Additionally,
|
|
|
|
|
the [`Pose Classification Colab (Extended)`] provides useful tools to find
|
|
|
|
|
outliers (e.g., wrongly predicted poses) and underrepresented classes (e.g., not
|
|
|
|
|
covering all camera angles) by classifying each sample against the entire
|
|
|
|
|
training set. After that, you'll be able to test the classifier on an arbitrary
|
|
|
|
|
video right in the Colab.
|
|
|
|
|
|
|
|
|
|
## Classification
|
|
|
|
|
|
|
|
|
|
Code of the classifier is available both in the
|
|
|
|
|
[`Pose Classification Colab (Extended)`] and in the
|
2021-03-25 23:01:44 +01:00
|
|
|
[ML Kit quickstart app](https://developers.google.com/ml-kit/vision/pose-detection/classifying-poses#4_integrate_with_the_ml_kit_quickstart_app).
|
2021-02-27 22:09:58 +01:00
|
|
|
Please refer to them for details of the approach described below.
|
|
|
|
|
|
|
|
|
|
The k-NN algorithm used for pose classification requires a feature vector
|
|
|
|
|
representation of each sample and a metric to compute the distance between two
|
|
|
|
|
such vectors to find the nearest pose samples to a target one.
|
|
|
|
|
|
|
|
|
|
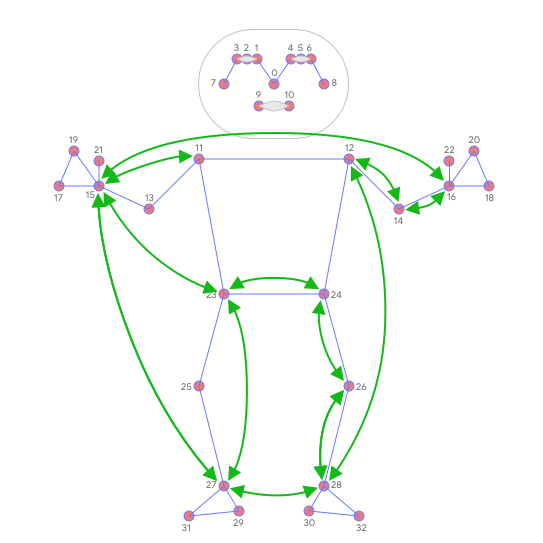
To convert pose landmarks to a feature vector, we use pairwise distances between
|
|
|
|
|
predefined lists of pose joints, such as distances between wrist and shoulder,
|
|
|
|
|
ankle and hip, and two wrists. Since the algorithm relies on distances, all
|
|
|
|
|
poses are normalized to have the same torso size and vertical torso orientation
|
|
|
|
|
before the conversion.
|
|
|
|
|
|
2022-09-06 23:29:51 +02:00
|
|
|
 |
|
2021-02-27 22:09:58 +01:00
|
|
|
:--------------------------------------------------------------------------------------------------------: |
|
|
|
|
|
*Fig 3. Main pairwise distances used for the pose feature vector.* |
|
|
|
|
|
|
|
|
|
|
To get a better classification result, k-NN search is invoked twice with
|
|
|
|
|
different distance metrics:
|
|
|
|
|
|
|
|
|
|
* First, to filter out samples that are almost the same as the target one but
|
|
|
|
|
have only a few different values in the feature vector (which means
|
|
|
|
|
differently bent joints and thus other pose class), minimum per-coordinate
|
|
|
|
|
distance is used as distance metric,
|
|
|
|
|
* Then average per-coordinate distance is used to find the nearest pose
|
|
|
|
|
cluster among those from the first search.
|
|
|
|
|
|
|
|
|
|
Finally, we apply
|
|
|
|
|
[exponential moving average](https://en.wikipedia.org/wiki/Moving_average#Exponential_moving_average)
|
|
|
|
|
(EMA) smoothing to level any noise from pose prediction or classification. To do
|
|
|
|
|
that, we search not only for the nearest pose cluster, but we calculate a
|
|
|
|
|
probability for each of them and use it for smoothing over time.
|
|
|
|
|
|
|
|
|
|
## Repetition Counting
|
|
|
|
|
|
|
|
|
|
To count the repetitions, the algorithm monitors the probability of a target
|
|
|
|
|
pose class. Let's take push-ups with its "up" and "down" terminal states:
|
|
|
|
|
|
|
|
|
|
* When the probability of the "down" pose class passes a certain threshold for
|
|
|
|
|
the first time, the algorithm marks that the "down" pose class is entered.
|
|
|
|
|
* Once the probability drops below the threshold, the algorithm marks that the
|
|
|
|
|
"down" pose class has been exited and increases the counter.
|
|
|
|
|
|
|
|
|
|
To avoid cases when the probability fluctuates around the threshold (e.g., when
|
|
|
|
|
the user pauses between "up" and "down" states) causing phantom counts, the
|
|
|
|
|
threshold used to detect when the state is exited is actually slightly lower
|
|
|
|
|
than the one used to detect when the state is entered. It creates an interval
|
|
|
|
|
where the pose class and the counter can't be changed.
|
|
|
|
|
|
|
|
|
|
## Future Work
|
|
|
|
|
|
2021-03-25 23:01:44 +01:00
|
|
|
We are actively working on improving
|
|
|
|
|
[BlazePose GHUM 3D](./pose.md#pose-landmark-model-blazepose-ghum-3d)'s Z
|
|
|
|
|
prediction. It will allow us to use joint angles in the feature vectors, which
|
|
|
|
|
are more natural and easier to configure (although distances can still be useful
|
|
|
|
|
to detect touches between body parts) and to perform rotation normalization of
|
|
|
|
|
poses and reduce the number of camera angles required for accurate k-NN
|
|
|
|
|
classification.
|
2021-02-27 22:09:58 +01:00
|
|
|
|
|
|
|
|
## Colabs
|
|
|
|
|
|
|
|
|
|
* [`Pose Classification Colab (Basic)`]
|
|
|
|
|
* [`Pose Classification Colab (Extended)`]
|
|
|
|
|
|
|
|
|
|
[`Pose Classification Colab (Basic)`]: https://mediapipe.page.link/pose_classification_basic
|
|
|
|
|
[`Pose Classification Colab (Extended)`]: https://mediapipe.page.link/pose_classification_extended
|